Téma / AVV: oceňovaný pomocník i trn v patě
AVV: oceňovaný pomocník i trn v patě
5.8.2015 – autor: VÁCLAV RUBEŠ, PAVEL ROVENSKÝ
AVV, tedy systém automatického vedení vlaku, není žádnou novinkou. Od počátku komerčního nasazení uplynulo v těchto dnech přesně 15 let, počátky jeho vývoje sahají dokonce 50 let zpět. Přesto do určité míry stále vzbuzuje emoce. Někdo jej považuje za zbytečný a preferuje spíše rychlé rozšíření zabezpečovače ETCS, jiný na něj nedá dopustit jako na výtečného pomocníka strojvedoucích s možnostmi, které obyčejný zabezpečovač nenabídne. Jaká budoucnost na AVV čeká? Nastal začátek konce, nebo se naopak ještě rozšíří?

Pomáhá snížit rutinní zátěž strojvedoucího a tím zvýšit bezpečnost provozu, ale zabezpečovač to není a nebude. Umí snížit spotřebu trakční energie v řádech až desítek procent, ale využívat jej je pouze na uvážení strojvedoucího. Dokáže číst trať dopředu, ale instalace potřebné traťové technologie velmi dlouho připomínala pověstné noty na buben. Na první pohled se může zdát, že víc schizofrenní už AVV být nemůže. Pokusili jsme se proto sestavit „životopis“ systému včetně otázek a úkolů, které konstruktéři i legislativci museli řešit. Pro pochopení konsekvencí je nezbytné se podívat hlouběji do historie.
Úkol první: automatická regulace rychlosti
Řešení klíčové otázky započalo v roce 1965, kdy byl vyvinut výzkumný vzorek regulátoru rychlosti a tahu, ověření základních principů probíhalo na motorovém voze M 286.001. V letech 1966–1967 byla využívána lokomotiva T 444.0204, která již dopravovala vlaky s větší zátěží a navíc byla vybavena elektropneumatickou přídavnou brzdou. Od roku 1968 byl regulátor zkoušen na motorových vozech M 286.011 a M 286.016. U druhého jmenovaného motorového vozu už vzorek regulátoru ovládal i elektricky řízený brzdič DAKO – BSE a došlo na zkoušky násobného řízení pomocí radiopojítek. Přes další testovací instalace se vývoj v roce 1972 dostal k sériově výrobě regulátorů rychlosti a tahu první generace pro motorové vozy řady M 296.1 v počtu cca 25 kusů, jejichž výrobcem byl ZPA Děčín. Vývojové práce pokračovaly směrem k druhé generaci a k sériové výrobě došlo po testování na strojích ES 499.0001 a 002, Kyklopech T 499.0001 a 002, EM 475.1053/54 a řadě T 478.4 v roce 1978. Byly instalovány do lokomotiv řady E 499.2, T 478.4 a motorového vozu M 475.0. V polovině osmdesátých let vyvrcholil vývoj regulátorů instalací třetí generace. Tím bylo vybaveno již z výroby přes 300 lokomotiv pozdějších řad 162/163, 362/363 a 263. Analogová architektura však již dosáhla technologického stropu a další vylepšení vlastností bylo možné jen plnou digitalizací. Čtvrtá generace, instalovaná poprvé do obou prototypových Krakenů řady 470, proto již stála výhradně na „jedničkách a nulách“. Následné využití ARR (např. u řady 843, 471 a dalších) se liší zejména v použitém hardwaru, principiálně ale stojí na plné digitalizaci.
Úkol druhý: cílové brzdění a optimalizace
Takřka paralelně s vývojem regulátoru rychlosti se postupnými krůčky rodil systém, který by uměl vlak automaticky zastavit (resp. snížit rychlost) v požadovaném místě. Začal vývoj dalšího důležitého fragmentu pozdějšího komplexního AVV – regulátoru cílového brzdění. V květnu 1968 proběhly na trati České Velenice – České Budějovice první orientační pokusy s motorovým vozem M 286.0011 s ručním spouštěním odměřování ujeté dráhy a integrací analogové hodnoty skutečné rychlosti. Již v srpnu byl tentýž vůz vybaven impulzním čidlem otáček nápravy a na zkušebním okruhu Výzkumného Ústavu Železničního se testovalo samočinné spouštění odměřování ujeté dráhy permanentními magnety a magnetickými spínači. Provozuschopný vzorek cílového brzdění byl k dispozici v roce 1970 a od roku 1972 začalo rutinní využití technologie u motorového vozu M 296.2022 na rychlíku pozdějšího jména Bezdrev. U téhož vozidla se poprvé objevuje optimalizátor, jehož úkolem je efektivní využití trakčních vlastností vozidla a úspora energie. Ten při zkouškách v reálných podmínkách (osobní vlaky, trať České Budějovice – České Velenice) předčil očekávání – přesnost příjezdů vykazovala odchylku +/– 7 sekund a prokázala se výrazná úspora nafty. Z dnešního pohledu je úsměvný nosič informací: mapa tratě byla „naprogramována“ do děrované papírové pásky, kterou četla elektromechanická čtečka. Důležitým stadiem vývoje je instalace na lince C pražského metra (vozidla Ečs, zkoušky 1977, rutinní provoz 1979–1996), kde došlo k implementaci dalších funkcionalit (např. ovládání dveří, palubního rozhlasu, respektování dělení napájecí kolejnice). Vznikl tak první český komerční systém automatického řízení drážního vozidla.
Na velkou železnici se vývoj vrací v roce 1981 (demonstrace ekonomických přínosů cílového brzdění na trati Plzeň – Horažďovice předměstí s lokomotivou S 499.0256), respektive 1985, kdy byla trať z Mariánských Lázní do Chebu vybavena adresnými informační body z permanentních magnetů pro ověřovací zkoušky též s lokomotivou S 499.0256. Elektronický popis tratě byl uložen už v pamětech EPROM, byla testována samočinná orientace.
Úkol třetí: komerční provoz systému AVV
Důležitou předehrou uvedení AVV do každodenního využívání v běžném provozu bylo vybavení lokomotivy 163.034 regulátorem cílového brzdění na základě mikroprocesorového systému MESIT MS 80 (k němuž došlo v létě roku 1991), se kterým vstoupila do pravidelného provozu v listopadu téhož roku na vlacích 5000 a 5011 v úseku Kolín – Praha Masarykovo nádraží a zpět. V dubnu 1992 dostala lokomotiva optimalizátor, srdcem se stal procesor Intel 8088 o frekvenci 4,77 MHz. Systém fungoval spolehlivě, proto byl další vývojový stupeň instalován v roce 1993 do jednotky 470.001/002, která již disponovala všemi celky pro komplexní funkčnost AVV (centrální řídicí člen, regulátor rychlosti, cílové brzdění, optimalizátor). Totéž (a navíc barevné monitory) dostal v roce 1994 i druhý Kraken. Také tady systém prokázal své výhody, po instalaci nových informačních bodů MIB6 (1996–1998) bylo jen otázkou času, kdy se dlouhé roky testování zúročí a systém změní status z „ve vývoji“ na „finální“.
Dnem D, kdy byl systém AVV oficiálně uveden do komerčního využití, se stal 27. červenec 2000. CityElefanty řady 471, tehdy čerstvě dodávané Českým drahám s nezbytným vybavením již z výroby (cílové brzdění se stalo součástí řídicího systému v roce 1997), začaly na trati Praha – Kolín v pravidelném provozu využívat systém AVV.
Úkol čtvrtý: vysvětlit přínosy
Zatímco v prenatálním období AVV narážel víceméně jen na otázky technického charakteru a jeho vývoj, jakkoli byl limitován v danou chvíli dostupnou technologií, postupoval kontinuálně kupředu, jeho novodobá historie připomíná s nadsázkou telenovelu s mnoha dějovými zvraty. Do značné míry je odrazem změny kompetencí a priorit v souvislosti s odčleněním dopravní cesty v minulém desetiletí. Pro prvotním boomu výstavby traťové části zařízení, kdy byly MIBy (magnetické informační body) instalovány na bezmála 300 kilometrech tratí s výhledem na dopracování úseků, kde byl aplikován model „ano – ne – ano – ne“ (například trať 090), došlo po vzniku SŽDC k období stagnace. Správce infrastruktury instaloval za poslední roky traťovou část pouze ve dvou případech: trať Ostrava – Opava a v úseku Pardubice – Přelouč (investice Českých drah). Lepší situace je u vozidel, jen České dráhy mají přes 200 vozidel vybavených vozidlovou částí (řada 471, 380, 842, 750.7, Bfhpvee295, část 163/362), ČD Cargo disponuje třiceti stroji řady 363.5. Automatické vedení vlaku budou mít ve výbavě i nové InterPantery.
Tvůrci a propagátoři technologie přitom dlouhodobě argumentují, že návratnost investice do traťové části (cca 100 tisíc Kč za 1 km jednokolejné tratě, respektive 150 tisíc za kilometr dvoukolejné) se při prokazatelné úspoře trakční energie (10–30 %) pohybuje v řádech jednotek let. Právě „argumentační kladivo“ v podobě schopnosti optimalizace jízdy a z toho vyplývajících úspor konečně padá na úrodnou půdu. Na podzim loňského roku totiž odstartoval projekt, na jehož konci má být (do)vybavena řada tratí (viz mapa). Prioritně jde o úseky v blízkosti velkých aglomerací, kde panuje čilá příměstská doprava (Praha, Ostrava). Právě tady jsou přínosy AVV největší nejen pokud jde o efektivitu (optimalizace jízdy často zastavujících vlaků), ale i kvůli dalšímu, i když často zpochybňovanému, benefitu.
Úkol pátý: pomáhat, ne nahrazovat
Jedním z hlavních motivů automatizace na železnici je v případě kategorie ATO (Automatic Train Operation), kam AVV patří, snížení zatížení strojvedoucích rutinními činnostmi. Operujíc s faktem, že lidský mozek rychleji reaguje na nepředvídatelné události v případě, že není zatížen běžnou obsluhou, je filozofie systému postavena na maximální snaze strojvedoucího od těchto činností odbřemenit. Ne vždy je to však takto chápáno, výjimkou nejsou názory, že strojvedoucí má řídit, nikoli „zapnout autopilota a nechat se vozit“. To však není principem AVV – hraje podpůrnou roli, dává strojvedoucímu možnost vozidlo ovládat a nechat systém „v záloze“ pro případ koncentrace na řešení nestandardní situace.
Byť tvůrci prohlašují, že systém nikdy nebyl vyvíjen jako autonomní vlakový zabezpečovač (ve smyslu převzetí odpovědnosti za strojvedoucího), dopad do bezpečnosti je přesto nezpochybnitelný. AVV by v případě vybavení tratě a splnění podmínky, že bude systém aktivní, s vysokou pravděpodobností zabránil např. vykolejení osobního vlaku 2316 ve vysoké rychlosti v červnu 2010 v Ústí nad Labem, nebo projetí návěsti Stůj na odbočce Odra v říjnu 2011. Leckoho napadne i aktuální dění, ale s ohledem na korektnost nebudeme o spojitosti AVV s událostí na Masarykově nádraží z 15. července 2015 do vydání závěrečné zprávy DI ČR spekulovat.
Úkol šestý: neusnout na vavřínech
Jakkoli by se ve světle vyřčeného mohlo zdát, že AVV stále bojuje o své místo na slunci, jeho vývoj pokračuje. Do života byla uvedena „low-costová“ varianta, která k orientaci nevyužívá fyzické MIBy, ale virtuální GIBy, jejichž pozice je definována pomocí zeměpisných souřadnic. Poloha vozidla je pak určována pomocí GPS. To umožňuje minimalizovat náklady na instalaci traťové části. Přechody mezi úseky pokrytými MIBy a GIBy systém zvládá bez problémů, což bylo mnohokrát ověřeno například při zkušebních jízdách rekonstruovaných vozů řady 842. Vyřešena byla i otázka přesné identifikace staniční koleje, na kterou vlak vjíždí: u GPS technologie je nutné počítat s určitou odchylkou vyhodnocení polohy (např. vlivem odrazů kvůli husté zástavbě), proto je nezbytná určitá součinnost strojvedoucího. Manuální potvrzení čísla koleje strojvedoucím ale již postupně nahrazuje malý permanentní magnet v konkrétní koleji.
Nevyčerpány jsou také možnosti optimalizátoru, v plánu je například možnost operativního zadávání změn jízdního řádu (přínos pro nákladní vlaky, jejichž jízdní řád se může od skutečnosti lišit) nebo zohlednění dynamiky jízdy těžkého vlaku do stoupání. To vše dále zlepší ekonomiku provozu zejména u nákladních vlaků.
V rámci pilotního projektu ETCS byla odzkoušena i symbióza s evropským vlakovým zabezpečovačem. AVV dokáže využívat balízy ETCS a používat je k orientaci namísto MIBů. Zvládá využívat i brzdných křivek generovaných ETCS. Paralelní fungování pak přináší radikální zvýšení bezpečnosti (ETCS dohlíží na dodržování rychlosti a návěstí) a efektivity provozu (AVV využívá parametry tratě, jízdu přizpůsobuje podmínkám ETCS). Zatím velkou neznámou však je, jak se na koexistenci bude dívat evropská legislativa. Panují poměrně oprávněné obavy, že v rámci interoperability bude Evropa vyžadovat instalaci jednotného ATO a jakkoli může být AVV v naší kotlině považováno za rodinné stříbro, svého favorita mají i jiní…
Co je AVV?
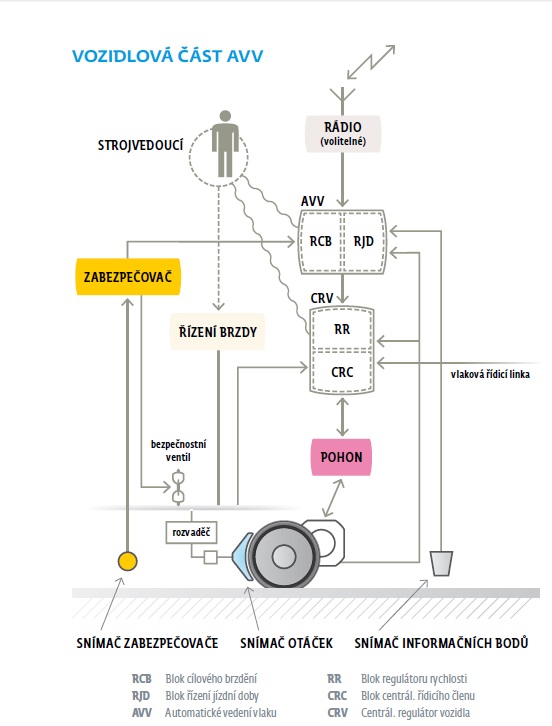
Automatické vedení vlaku patří do skupiny autonomních systémů určených pro řízení drážních vozidel (ATO – Automatic Train Operation). Jde o zařízení, které ovládá pohon i brzdy, reguluje rychlost s přesností na 1 km/h, zastavuje s přesností 1 m. Optimalizuje jízdu vlaku tak, aby vlak do následující stanice či zastávky dojel včas s minimem spotřeby energie využíváním výběhu. Na vozidlo se přenáší pouze informace o poloze vlaku na železniční síti a informace o kódu vlakového zabezpečovače (pokud je tato informace k dispozici).
Stahovačky, šachovnice a jiné speciality
Vedle stávajících funkcí (udržování dovolené rychlosti, zastavování v pravidelných místech) se však nabízí otázka, zda by AVV nemohl dohlížet i na stahování sběrače nebo jízdu bez odběru trakčního proudu (tzv. stahovačky, šachovnice). U trvalých omezení na širé trati by teoreticky bylo možné respektovat návěstidla pro elektrický provoz, problematické jsou ale podmíněné „stahovačky“ a místa ve stanicích (děličníky). Pro nejednotnost systému, kdy jednou by sběrač musel stáhnout strojvedoucí, jindy by se o tuto povinnost staral AVV, byla myšlenka s respektováním návěstí pro elektrický provoz opuštěna. Změna by mohla nastat s nástupem ETCS. Povedlo se ale naučit AVV počítat s místy, kde je předpoklad horších adhezních podmínek (např. spadané listí). V těchto místech AVV uvažuje s fiktivně zadaným vyšším sklonem tratě, zpravidla o 20 promile. Jde např. o zastávky Praha-Klánovice, Čelákovice-Jiřina nebo kusou kolej v Praze Masarykově nádraží. Dále systém zohledňuje omezení tažné síly strojvedoucím. Pod 80 % je to systémem AVV vyhodnoceno jako snížená adheze, dojde ke změně rozdělení účinku brzd mezi elektrodynamickou a třecí brzdu. Snížením zadaných brzdicích procent má strojvedoucí možnost aktivovat „mírnější režim“ brzdění AVV.
Optimalizátor pro osobáky vs. rychlíky
Nejekonomičtější režim provozu je co možná nejsvižnější rozjezd a zavedení výběhu (jízda setrvačností) v místě, ze kterého vlak do stanice/zastávky přijede včas. Předčasný příjezd i o několik sekund znamená značné navýšení spotřeby energie. Zatímco u osobních vlaků není vzhledem k několikaminutové jízdě nutné uvažovat v omezení traťovou rychlostí, opačný případ platí pro rychlíky. Doba a vzdálenost mezi stanicemi, kde dálkový vlak zastavuje, bývá i přes 60 minut a 100 kilometrů, dovolená rychlost přitom kolísá mezi 80 a 160 km/h. Interakce s rychlostním profilem je tedy naprosto zásadní a AVV s ní počítá (tvůrci to poprvé zohlednili u AVV pro lokomotivy řady 380). Aby nedocházelo ke zbytečnému brzdění, zohledňuje systém dokonce i časy příjezdů osobních vlaků do stanic, ve kterých dochází k předjíždění. Tedy tak, aby rychlík měl „zelenou ulici“ a nemusel snižovat rychlost k návěstidlům zakazujícím jízdu.
Fotogalerie



Další články této rubriky
 V sedle bicyklu po zrušených drahách
V sedle bicyklu po zrušených drahách
27.4.2025 - Nejlépe funkční je železnice ve chvíli, kdy plní svůj účel a slouží přepravě cestujících, nákladu či ideálně obojího. Vzhledem k proslulé hustotě tuzemské železniční sítě a specifikům jejího dalšího rozvoje je ale… »
 Start bateriových Panterů inspirací pro další tratě
Start bateriových Panterů inspirací pro další tratě
29.3.2025 - Začátek provozu řady 690.2 vybavených trakčními bateriemi na trati z Ostravy do Veřovic byl v rámci tuzemské železnice historickým milníkem. Vůbec poprvé mají cestující možnost ocenit výhody elektrických jednotek, jež zvládnou… »
 Modernizace nádraží: Na co se cestující mohou těšit?
Modernizace nádraží: Na co se cestující mohou těšit?
1.3.2025 - Nádraží jsou vstupní branou na železnici. Často utváří první a zároveň dokreslují i poslední dojem z cesty vlakem. Jejich stav v Česku sice bývá různý, naštěstí ale v poslední době můžeme sledovat hned několik podstatných… »